BrainSense Demo
This lesson demonstrates and tests all BrainSense kit modules, showing how simple code unifies sensors and modules for a cohesive smart home prototype.
Prerequisite
You must understand how to deal with all modules as detailed in BrainSense modules.
Swing Door System
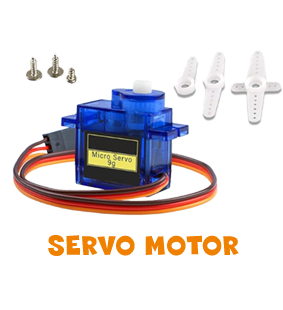
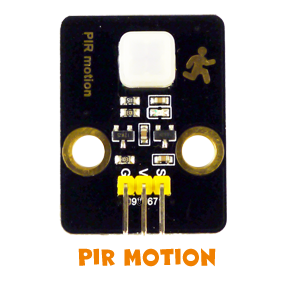
Our home door operates through a Servo motor, and we aim to implement a smart mechanism for its movement using a PIR motion sensor. The objective is to have the door open whenever the PIR motion sensor detects an object, just like the mall doors.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
pir_pin = 3
# Initialize actuator pins
servo_pin = 10
# Function for movement based on PIR sensor
def move(motion_sensor_value):
if not motion_sensor_value:
BrainPad.Servo.Set(servo_pin, 0)
else:
BrainPad.Servo.Set(servo_pin, 90)
# Main loop
while True:
motion_sensor_value = BrainPad.Digital.Read(pir_pin, 1)
move(motion_sensor_value)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int pir_pin = 3;
// Initialize actuator pins
public static int servo_pin = 10;
}
// Main loop
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
bool motion_sensor_value = BrainPad.Digital.Read(Globals.pir_pin, 1);
Move(motion_sensor_value, BrainPad);
}
}
// Function for movement based on PIR sensor
static void Move(bool motion_sensor_value, DUELinkController BrainPad)
{
if (!motion_sensor_value)
{
BrainPad.Servo.Set(Globals.servo_pin, 0);
}
else if (motion_sensor_value)
{
BrainPad.Servo.Set(Globals.servo_pin, 90);
}
}
}
}JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const pir_pin = 3;
// Initialize actuator pins
const servo_pin = 10;
// Function for movement based on PIR sensor
async function move(motion_sensor_value) {
if (!motion_sensor_value)
await BrainPad.Servo.Set(servo_pin, 0);
else
await BrainPad.Servo.Set(servo_pin, 90);
}
// Main loop
async function mainLoop() {
while (true) {
let motion_sensor_value = await BrainPad.Digital.Read(pir_pin, 1);
await move(motion_sensor_value);
}
}
// Call the main loop function
mainLoop();Steam Flow Measurement
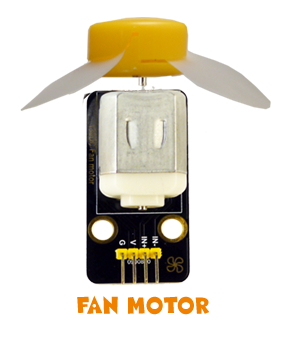
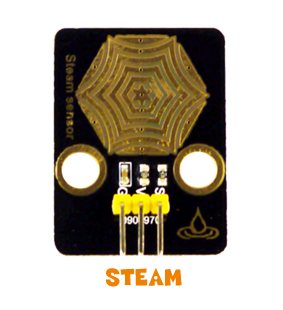
In our smart home setup, particularly in the seacoast areas, we’ve integrated a Steam Sensor to monitor steam levels. If the steam overextends predefined limits, the fan will automatically activate as a responsive measure the lights turn blue.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
steam_pin = 5
# Initialize actuator pins
fan_pin = 11
led_pin = 12
# Function for steam sensor action
def steam(steam_sensor_value):
if steam_sensor_value > 70:
BrainPad.Analog.Write(fan_pin, 50)
for i in range(0, 4):
BrainPad.Neo.SetColor(i, 0x0000FF)
BrainPad.Neo.Show(led_pin, 4)
# Main loop
while True:
BrainPad.Neo.Clear()
steam_sensor_value = BrainPad.Analog.Read(steam_pin)
BrainPad.Analog.Write(fan_pin, 0)
steam(steam_sensor_value)
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int steam_pin = 5;
// Initialize actuator pins
public static int fan_pin = 11;
public static int led_pin = 12;
}
// Main loop
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Neo.Clear();
double steam_sensor_value = BrainPad.Analog.Read(Globals.steam_pin); steam_sensor_value = (double)System.Math.Round(steam_sensor_value, 2);
BrainPad.Analog.Write(Globals.fan_pin, 0);
Steam(steam_sensor_value, BrainPad);
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
// Function for steam sensor action
static void Steam(double steam_sensor_values, DUELinkController BrainPad)
{
if (steam_sensor_values > 70)
{
BrainPad.Analog.Write(Globals.fan_pin, 50);
for (int i = 0; i < 4; i++)
{
BrainPad.Neo.SetColor(i, 0x0000FF);
}
BrainPad.Neo.Show(12, 4);
}
}
}
}JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const steam_pin = 5;
// Initialize actuator pins
const fan_pin = 11;
const led_pin = 12;
// Function for steam sensor action
async function steam(steam_sensor_value) {
if (steam_sensor_value >= 70) {
await BrainPad.Analog.Write(fan_pin, 50);
for (let i = 0; i < 4; i++) {
await BrainPad.Neo.SetColor(i, 0x0000FF);
}
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Neo.Clear();
await BrainPad.Analog.Write(fan_pin, 0);
let steam_sensor_value = await BrainPad.Analog.Read(steam_pin);
await steam(steam_sensor_value);
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Call the main loop function
mainLoop();Fire Alarm System

A crucial safety feature in our smart home is a fire alarm system. Achieved through a flame sensor, it detects any fire flames and triggers both audible and visual alerts to ensure immediate response including the automatic opening of house doors.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
flame_pin = 4
# Initialize actuator pins
servo_pin = 10
led_pin = 12
horn_pin = 13
# Function for flame sensor action
def flame(flame_sensor_value):
if flame_sensor_value == 0:
BrainPad.Servo.Set(servo_pin, 90)
for n in range(400, 501, 5):
BrainPad.System.Beep(horn_pin, n, 20)
BrainPad.Neo.SetColor(0, 0xFF0000)
BrainPad.Neo.SetColor(1, 0x0000FF)
BrainPad.Neo.SetColor(2, 0xFF0000)
BrainPad.Neo.SetColor(3, 0x0000FF)
BrainPad.Neo.Show(led_pin, 4)
BrainPad.System.Wait(20)
BrainPad.Neo.Clear()
BrainPad.Neo.Show(led_pin, 4)
# Main loop
while True:
BrainPad.Neo.Clear()
BrainPad.Servo.Set(servo_pin, 0)
flame_sensor_value = BrainPad.Digital.Read(flame_pin,1)
flame(flame_sensor_value)
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int flame_pin = 4;
// Initialize actuator pins
public static int servo_pin = 10;
public static int led_pin = 12;
public static int horn_pin = 13;
}
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Neo.Clear();
BrainPad.Servo.Set(Globals.servo_pin, 0);
bool flame_sensor_value = BrainPad.Digital.Read(Globals.flame_pin, 1);
Flame(flame_sensor_value, BrainPad);
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
static void Flame(bool flame_sensor_value, DUELinkController BrainPad)
{
if (!flame_sensor_value)
{
BrainPad.Servo.Set(Globals.servo_pin, 90);
for (int n = 400; n <= 500; n += 5)
{
BrainPad.System.Beep(Globals.horn_pin, (uint)n, 20);
BrainPad.Neo.SetColor(0, 0xFF0000);
BrainPad.Neo.SetColor(1, 0x0000FF);
BrainPad.Neo.SetColor(2, 0xFF0000);
BrainPad.Neo.SetColor(3, 0x0000FF);
BrainPad.Neo.Show(Globals.led_pin, 4);
BrainPad.System.Wait(20);
BrainPad.Neo.Clear();
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
}
}
}
JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const flame_pin = 4;
// Initialize actuator pins
const servo_pin = 10;
const led_pin = 12;
const horn_pin = 13;
// Function for flame sensor action
async function flame(flame_sensor_value) {
if (!flame_sensor_value) {
await BrainPad.Servo.Set(servo_pin, 90);
for (let n = 400; n <= 500; n += 5) {
await BrainPad.System.Beep(horn_pin, n, 20);
await BrainPad.Neo.SetColor(0, 0xFF0000)
await BrainPad.Neo.SetColor(1, 0x0000FF)
await BrainPad.Neo.SetColor(2, 0xFF0000)
await BrainPad.Neo.SetColor(3, 0x0000FF)
await BrainPad.Neo.Show(led_pin, 4);
await BrainPad.System.Wait(20);
await BrainPad.Neo.Clear();
await BrainPad.Neo.Show(led_pin, 4);
}
}
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Neo.Clear();
await BrainPad.Servo.Set(servo_pin, 0);
let flame_sensor_value = await BrainPad.Digital.Read(flame_pin, 1);
await flame(flame_sensor_value);
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Call the main loop function
mainLoop();Auto Lighting System

In our smart home, energy efficiency is a priority. With a photoresistor as a light sensor, we ensure optimal electricity consumption. When daylight is present outdoors, the home lights automatically turn off, and as darkness falls, the lights seamlessly switch on.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
photo_pin = 0
# Initialize actuator pins
led_pin = 12
# Function for light sensor action
def light(light_sensor_value):
if light_sensor_value <= 85:
for i in range(0, 4):
BrainPad.Neo.SetColor(i, 0xFFC800)
# Main loop
while True:
BrainPad.Neo.Clear()
light_sensor_value = BrainPad.Analog.Read(photo_pin)
light(light_sensor_value)
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int photo_pin = 0;
// Initialize actuator pins
public static int led_pin = 12;
}
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Neo.Clear();
double light_sensor_value = BrainPad.Analog.Read(Globals.photo_pin); light_sensor_value = (double)System.Math.Round(light_sensor_value, 2);
Light(light_sensor_value, BrainPad);
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
// Function for light sensor action
static void Light(double light_sensor_value, DUELinkController BrainPad)
{
if (light_sensor_value <= 85)
{
for (int i = 0; i < 4; i++)
{
BrainPad.Neo.SetColor(i, 0xFFC800);
}
}
}
}
}
JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const photo_pin = 0;
// Initialize actuator pins
const led_pin = 12;
// Function for light sensor action
async function light(light_sensor_value) {
if (light_sensor_value <= 85) {
for (let i = 0; i < 4; i++) {
await BrainPad.Neo.SetColor(i, 0xFFC800);
}
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Neo.Clear();
let light_sensor_value = await BrainPad.Analog.Read(photo_pin);
await light(light_sensor_value);
await BrainPad.Display.Show();
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Call the main loop function
mainLoop();Plant Watering System
Within our smart home, tending to plants is an essential thing. A soil moisture sensor measures moisture levels in our grond. If it drops below the selected level, an immediate light and sound alarm reminds us to promptly water our plants.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
soil_pin = 1
# Initialize actuator pins
led_pin = 12
horn_pin = 13
# Function for soil moisture sensor action
def soil(soilMoisture_sensor_value):
if soilMoisture_sensor_value < 10:
for n in range(100, 151, 50):
BrainPad.System.Beep(horn_pin, n, 20)
BrainPad.Neo.SetColor(0, 0xFF00FF)
BrainPad.Neo.SetColor(1, 0x00FF00)
BrainPad.Neo.SetColor(2, 0xFF00FF)
BrainPad.Neo.SetColor(3, 0x00FF00)
BrainPad.Neo.Show(led_pin, 4)
BrainPad.System.Wait(20)
BrainPad.Neo.Clear()
BrainPad.Neo.Show(led_pin, 4)
# Main loop
while True:
BrainPad.Neo.Clear()
soilMoisture_sensor_value = BrainPad.Analog.Read(soil_pin)
soil(soilMoisture_sensor_value)
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Test
{
public static class Globals
{
// Initialize sensor pins
public static int soil_pin = 1;
// Initialize actuator pins
public static int led_pin = 12;
public static int horn_pin = 13;
}
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Neo.Clear();
double soilMoisture_sensor_value = BrainPad.Analog.Read(Globals.soil_pin); soilMoisture_sensor_value = (double)System.Math.Round(soilMoisture_sensor_value, 2);
Soil(soilMoisture_sensor_value, BrainPad);
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
static void Soil(double soilMoisture_sensor_value, DUELinkController BrainPad)
{
if (soilMoisture_sensor_value < 10)
{
for (int n = 100; n <= 150; n += 50)
{
BrainPad.System.Beep(Globals.horn_pin, (uint)(int)n, 20);
BrainPad.Neo.SetColor(0, 0xFF00FF);
BrainPad.Neo.SetColor(1, 0x00FF00);
BrainPad.Neo.SetColor(2, 0xFF00FF);
BrainPad.Neo.SetColor(3, 0x00FF00);
BrainPad.Neo.Show(Globals.led_pin, 4);
BrainPad.System.Wait(20);
BrainPad.Neo.Clear();
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
}
}
}
JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const soil_pin = 1;
// Initialize actuator pins
const led_pin = 12;
const horn_pin = 13;
// Function for soil moisture sensor action
async function soil(soilMoisture_sensor_value) {
if (soilMoisture_sensor_value < 10) {
for (let n = 100; n <= 150; n += 50) {
await BrainPad.System.Beep(horn_pin, n, 20);
await BrainPad.Neo.SetColor(0, 0xFF00FF)
await BrainPad.Neo.SetColor(1, 0x00FF00)
await BrainPad.Neo.SetColor(2, 0xFF00FF)
await BrainPad.Neo.SetColor(3, 0x00FF00)
await BrainPad.Neo.Show(led_pin, 4);
await BrainPad.System.Wait(20);
await BrainPad.Neo.Clear();
await BrainPad.Neo.Show(led_pin, 4);
}
}
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Neo.Clear();
let soilMoisture_sensor_value = await BrainPad.Analog.Read(soil_pin);
await soil(soilMoisture_sensor_value);
await BrainPad.Display.Show();
}
}
// Call the main loop function
mainLoop();Smart Home Dashboard
Centralizing information is important for a better understanding of what going on in our home. the LCD screens on our microcomputers—black and white for Pulse and colorful for Rave— help us to show sensors’ values, including temperature and humidity from the DHT11 sensor. This unified display offers real-time insights into our house environment.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
pir_pin = 3
flame_pin = 4
steam_pin = 5
temp_humid_pin = 6
photo_pin = 0
soil_pin = 1
# Initialize actuator pins
servo_pin = 10
fan_pin = 11
led_pin = 12
horn_pin = 13
# Function to main LCD display
def pulse_lcd(steam_sensor_value,light_sensor_value,soilMoisture_sensor_value,temperature_sensor_value,humidity_sensor_value):
BrainPad.Display.DrawTextScale("BrainSense",1,3,0,2,1)
y=15
x=5
BrainPad.Display.DrawText("STEAM= ",1,x,y)
BrainPad.Display.DrawText(int(steam_sensor_value),1,x+60,y)
BrainPad.Display.DrawText("LIGHT= ", 1, x, y+10)
BrainPad.Display.DrawText(int(light_sensor_value), 1, x + 60, y+10)
BrainPad.Display.DrawText("SOIL= ", 1, x, y+20)
BrainPad.Display.DrawText(int(soilMoisture_sensor_value), 1, x + 60, y+20)
BrainPad.Display.DrawText("Celsius= ", 1, x, y+30)
BrainPad.Display.DrawText(float(temperature_sensor_value), 1, x + 60, y+30)
BrainPad.Display.DrawText("Humidity= ", 1, x, y+40)
BrainPad.Display.DrawText(float(humidity_sensor_value), 1, x + 60, y+40)
# Main loop
while True:
BrainPad.Display.Clear(0)
BrainPad.Neo.Clear()
steam_sensor_value = BrainPad.Analog.Read(steam_pin)
light_sensor_value = BrainPad.Analog.Read(photo_pin)
soilMoisture_sensor_value = BrainPad.Analog.Read(soil_pin)
temperature_sensor_value = BrainPad.Temperature.Read(temp_humid_pin, 11)
humidity_sensor_value = BrainPad.Humidity.Read(temp_humid_pin, 11)
pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value)
BrainPad.Display.Show()
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int pir_pin = 3;
public static int flame_pin = 4;
public static int steam_pin = 5;
public static int temp_humid_pin = 6;
public static int photo_pin = 0;
public static int soil_pin = 1;
// Initialize actuator pins
public static int servo_pin = 10;
public static int fan_pin = 11;
public static int led_pin = 12;
public static int horn_pin = 13;
}
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Display.Clear(0);
double steam_sensor_value = BrainPad.Analog.Read(Globals.steam_pin); steam_sensor_value = (double)System.Math.Round(steam_sensor_value, 2);
double light_sensor_value = BrainPad.Analog.Read(Globals.photo_pin); light_sensor_value = (double)System.Math.Round(light_sensor_value, 2);
double soilMoisture_sensor_value = BrainPad.Analog.Read(Globals.soil_pin); soilMoisture_sensor_value = (double)System.Math.Round(soilMoisture_sensor_value, 2);
double temperature_sensor_value = BrainPad.Temperature.Read(Globals.temp_humid_pin, 11); temperature_sensor_value = (double)System.Math.Round(temperature_sensor_value, 2);
double humidity_sensor_value = BrainPad.Humidity.Read(Globals.temp_humid_pin, 11); humidity_sensor_value = (double)System.Math.Round(humidity_sensor_value, 2);
BrainPad.Analog.Write(Globals.fan_pin, 0);
PulseLCD(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value, BrainPad);
BrainPad.Display.Show();
}
}
// Function to update LCD display - pulse_lcd
static void PulseLCD(double steam_sensor_value, double light_sensor_value, double soilMoisture_sensor_value, double temperature_sensor_value, double humidity_sensor_value, DUELinkController BrainPad)
{
BrainPad.Display.DrawTextScale("BrainSense", 1, 3, 0, 2, 1);
int y = 15;
int x = 5;
BrainPad.Display.DrawText("STEAM= ", 1, x, y);
BrainPad.Display.DrawText(steam_sensor_value.ToString(), 1, x + 60, y);
BrainPad.Display.DrawText("LIGHT= ", 1, x, y + 10);
BrainPad.Display.DrawText(light_sensor_value.ToString(), 1, x + 60, y + 10);
BrainPad.Display.DrawText("SOIL= ", 1, x, y + 20);
BrainPad.Display.DrawText(soilMoisture_sensor_value.ToString(), 1, x + 60, y + 20);
BrainPad.Display.DrawText("Celsius= ", 1, x, y + 30);
BrainPad.Display.DrawText(temperature_sensor_value.ToString(), 1, x + 60, y + 30);
BrainPad.Display.DrawText("Humidity= ", 1, x, y + 40);
BrainPad.Display.DrawText(humidity_sensor_value.ToString(), 1, x + 60, y + 40);
}
}
}
JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const pir_pin = 3;
const flame_pin = 4;
const steam_pin = 5;
const temp_humid_pin = 6;
const photo_pin = 0;
const soil_pin = 1;
// Initialize actuator pins
const servo_pin = 10;
const fan_pin = 11;
const led_pin = 12;
const horn_pin = 13;
// Function to update LCD display - pulse_lcd
async function pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value) {
await BrainPad.Display.DrawTextScale("BrainSense", 1, 3, 0, 2, 1)
let y = 15
let x = 5
await BrainPad.Display.DrawText("STEAM= ", 1, x, y)
await BrainPad.Display.DrawText(steam_sensor_value.toString(), 1, x + 60, y)
await BrainPad.Display.DrawText("LIGHT= ", 1, x, y + 10)
await BrainPad.Display.DrawText(light_sensor_value.toString(), 1, x + 60, y + 10)
await BrainPad.Display.DrawText("SOIL= ", 1, x, y + 20)
await BrainPad.Display.DrawText(soilMoisture_sensor_value.toString(), 1, x + 60, y + 20)
await BrainPad.Display.DrawText("Celsius= ", 1, x, y + 30)
await BrainPad.Display.DrawText(temperature_sensor_value.toString(), 1, x + 60, y + 30)
await BrainPad.Display.DrawText("Humidity= ", 1, x, y + 40)
await BrainPad.Display.DrawText(humidity_sensor_value.toString(), 1, x + 60, y + 40)
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Display.Clear(0);
let steam_sensor_value = await BrainPad.Analog.Read(steam_pin);
let light_sensor_value = await BrainPad.Analog.Read(photo_pin);
let soilMoisture_sensor_value = await BrainPad.Analog.Read(soil_pin);
let temperature_sensor_value = await BrainPad.Temperature.Read(temp_humid_pin, 11);
let humidity_sensor_value = await BrainPad.Humidity.Read(temp_humid_pin, 11);
await pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value);
await BrainPad.Display.Show();
}
}
// Call the main loop function
mainLoop();Smart Home Full Demo

Now we will create a fully-featured smart home experience by combining previous small demos into one system. Integrate sensors like the Steam sensor, PIR motion sensor, flame sensor, photoresistor, and soil moisture sensor with other different modules like motors lights, and sound. Utilize the LCD screens on our microcomputers for a customized dashboard, showcasing real-time values, including temperature and humidity from the DHT11 sensor. This unified code provides an overview of our BrainSense kit that represents a smart home prototype.
Python
from DUELink.DUELinkController import DUELinkController
available_port = DUELinkController.GetConnectionPort()
BrainPad = DUELinkController(available_port)
# Initialize sensor pins
pir_pin = 3
flame_pin = 4
steam_pin = 5
temp_humid_pin = 6
photo_pin = 0
soil_pin = 1
# Initialize actuator pins
servo_pin = 10
fan_pin = 11
led_pin = 12
horn_pin = 13
# Function for movement based on PIR sensor
def move(motion_sensor_value):
if not motion_sensor_value:
BrainPad.Servo.Set(servo_pin, 0)
else:
BrainPad.Servo.Set(servo_pin, 90)
# Function for steam sensor action
def steam(steam_sensor_value):
if steam_sensor_value > 70:
BrainPad.Analog.Write(fan_pin, 50)
for i in range(0, 4):
BrainPad.Neo.SetColor(i, 0x0000FF)
BrainPad.Neo.Show(led_pin, 4)
# Function for flame sensor action
def flame(flame_sensor_value):
if flame_sensor_value == 0:
BrainPad.Servo.Set(servo_pin, 90)
for n in range(400, 501, 5):
BrainPad.System.Beep(horn_pin, n, 20)
BrainPad.Neo.SetColor(0, 0xFF0000)
BrainPad.Neo.SetColor(1, 0x0000FF)
BrainPad.Neo.SetColor(2, 0xFF0000)
BrainPad.Neo.SetColor(3, 0x0000FF)
BrainPad.Neo.Show(led_pin, 4)
BrainPad.System.Wait(20)
BrainPad.Neo.Clear()
BrainPad.Neo.Show(led_pin, 4)
# Function for light sensor action
def light(light_sensor_value):
if light_sensor_value <= 85:
for i in range(0, 4):
BrainPad.Neo.SetColor(i, 0xFFC800)
# Function for soil moisture sensor action
def soil(soilMoisture_sensor_value):
if soilMoisture_sensor_value < 10:
for n in range(100, 151, 50):
BrainPad.System.Beep(horn_pin, n, 20)
BrainPad.Neo.SetColor(0, 0xFF00FF)
BrainPad.Neo.SetColor(1, 0x00FF00)
BrainPad.Neo.SetColor(2, 0xFF00FF)
BrainPad.Neo.SetColor(3, 0x00FF00)
BrainPad.Neo.Show(led_pin, 4)
BrainPad.System.Wait(20)
BrainPad.Neo.Clear()
BrainPad.Neo.Show(led_pin, 4)
# Function to update LCD display
def rave_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value):
BrainPad.Display.DrawTextScale("BrainSense",0xf08000,20,10,2,2)
y=35
x=5
BrainPad.Display.DrawTextScale("STEAM= ",0x00ff00, x, y,1,2)
BrainPad.Display.DrawTextScale("LIGHT= ", 0x00ff00, x, y+20,1,2)
BrainPad.Display.DrawTextScale("SOIL= ", 0x00ff00, x, y+40,1,2)
BrainPad.Display.DrawText("Celsius= ", 0xf0ff00, x+40, y+60)
BrainPad.Display.DrawText(float(temperature_sensor_value), 0xf0ff00, x + 100, y+60)
BrainPad.Display.DrawText("Humidity= ", 0x00fff0, x+40, y+70)
BrainPad.Display.DrawText(float(humidity_sensor_value), 0x00fff0, x + 100,y+70)
width = 103
height = 12
y = 36
x = 42
# drawing the white rectangles
for n in range(0,3):
BrainPad.Display.DrawFillRect(0xffffff, x, y, width, height)
BrainPad.Display.DrawFillRect(0x000000, x + 2, y + 2, width - 4, height - 4)
y = y + 20
x = 44
y = 38
height = 8
# drawing the bars based on sensors values
BrainPad.Display.DrawFillRect(0xf08000, x, y, steam_sensor_value, height)
BrainPad.Display.DrawFillRect(0xf08000, x, y + 20, light_sensor_value, height)
BrainPad.Display.DrawFillRect(0xf08000, x, y + 40, soilMoisture_sensor_value, height)
# Function to main LCD display
def pulse_lcd(steam_sensor_value,light_sensor_value,soilMoisture_sensor_value,temperature_sensor_value,humidity_sensor_value):
BrainPad.Display.DrawTextScale("BrainSense",1,3,0,2,1)
y=15
x=5
BrainPad.Display.DrawText("STEAM= ",1,x,y)
BrainPad.Display.DrawText(int(steam_sensor_value),1,x+60,y)
BrainPad.Display.DrawText("LIGHT= ", 1, x, y+10)
BrainPad.Display.DrawText(int(light_sensor_value), 1, x + 60, y+10)
BrainPad.Display.DrawText("SOIL= ", 1, x, y+20)
BrainPad.Display.DrawText(int(soilMoisture_sensor_value), 1, x + 60, y+20)
BrainPad.Display.DrawText("Celsius= ", 1, x, y+30)
BrainPad.Display.DrawText(float(temperature_sensor_value), 1, x + 60, y+30)
BrainPad.Display.DrawText("Humidity= ", 1, x, y+40)
BrainPad.Display.DrawText(float(humidity_sensor_value), 1, x + 60, y+40)
# Implement LCD text display
# Main loop
while True:
BrainPad.Display.Clear(0)
BrainPad.Neo.Clear()
motion_sensor_value = BrainPad.Digital.Read(pir_pin,1)
steam_sensor_value = BrainPad.Analog.Read(steam_pin)
flame_sensor_value = BrainPad.Digital.Read(flame_pin,1)
light_sensor_value = BrainPad.Analog.Read(photo_pin)
soilMoisture_sensor_value = BrainPad.Analog.Read(soil_pin)
temperature_sensor_value = BrainPad.Temperature.Read(temp_humid_pin, 11)
humidity_sensor_value = BrainPad.Humidity.Read(temp_humid_pin, 11)
BrainPad.Analog.Write(fan_pin, 0)
pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value)
move(motion_sensor_value)
steam(steam_sensor_value)
flame(flame_sensor_value)
light(light_sensor_value)
soil(soilMoisture_sensor_value)
BrainPad.Display.Show()
BrainPad.Neo.Show(led_pin,4)C#
using GHIElectronics.DUELink;
namespace BrainSense
{
class Program
{
public static class Globals
{
// Initialize sensor pins
public static int pir_pin = 3;
public static int flame_pin = 4;
public static int steam_pin = 5;
public static int temp_humid_pin = 6;
public static int photo_pin = 0;
public static int soil_pin = 1;
// Initialize actuator pins
public static int servo_pin = 10;
public static int fan_pin = 11;
public static int led_pin = 12;
public static int horn_pin = 13;
}
// Main loop
static void Main(string[] args)
{
DUELinkController BrainPad = new DUELinkController(DUELinkController.GetConnectionPort());
while (true)
{
BrainPad.Display.Clear(0);
BrainPad.Neo.Clear();
bool motion_sensor_value = BrainPad.Digital.Read(Globals.pir_pin, 1);
double steam_sensor_value = BrainPad.Analog.Read(Globals.steam_pin); steam_sensor_value = (double)System.Math.Round(steam_sensor_value, 2);
bool flame_sensor_value = BrainPad.Digital.Read(Globals.flame_pin, 1);
double light_sensor_value = BrainPad.Analog.Read(Globals.photo_pin); light_sensor_value = (double)System.Math.Round(light_sensor_value, 2);
double soilMoisture_sensor_value = BrainPad.Analog.Read(Globals.soil_pin); soilMoisture_sensor_value = (double)System.Math.Round(soilMoisture_sensor_value, 2);
double temperature_sensor_value = BrainPad.Temperature.Read(Globals.temp_humid_pin, 11); temperature_sensor_value = (double)System.Math.Round(temperature_sensor_value, 2);
double humidity_sensor_value = BrainPad.Humidity.Read(Globals.temp_humid_pin, 11); humidity_sensor_value = (double)System.Math.Round(humidity_sensor_value, 2);
BrainPad.Analog.Write(Globals.fan_pin, 0);
// RaveLCD(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value, BrainPad);
PulseLCD(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value, BrainPad);
Move(motion_sensor_value, BrainPad);
Steam(steam_sensor_value, BrainPad);
Flame(flame_sensor_value, BrainPad);
Light(light_sensor_value, BrainPad);
Soil(soilMoisture_sensor_value, BrainPad);
BrainPad.Display.Show();
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
// Function for movement based on PIR sensor
static void Move(bool motion_sensor_value, DUELinkController BrainPad)
{
if (!motion_sensor_value)
{
BrainPad.Servo.Set(Globals.servo_pin, 0);
}
else
{
BrainPad.Servo.Set(Globals.servo_pin, 90);
}
}
// Function for steam sensor action
static void Steam(double steam_sensor_values, DUELinkController BrainPad)
{
if (steam_sensor_values > 70)
{
BrainPad.Analog.Write(Globals.fan_pin, 50);
for (int i = 0; i < 4; i++)
{
BrainPad.Neo.SetColor(i, 0x0000FF);
}
BrainPad.Neo.Show(12, 4);
}
}
// Function for flame sensor action
static void Flame(bool flame_sensor_value, DUELinkController BrainPad)
{
if (!flame_sensor_value)
{
BrainPad.Servo.Set(Globals.servo_pin, 90);
for (int n = 400; n <= 500; n += 5)
{
BrainPad.System.Beep(Globals.horn_pin, (uint) n, 20);
BrainPad.Neo.SetColor(0, 0xFF0000);
BrainPad.Neo.SetColor(1, 0x0000FF);
BrainPad.Neo.SetColor(2, 0xFF0000);
BrainPad.Neo.SetColor(3, 0x0000FF);
BrainPad.Neo.Show(Globals.led_pin, 4);
BrainPad.System.Wait(20);
BrainPad.Neo.Clear();
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
}
// Function for light sensor action
static void Light(double light_sensor_value, DUELinkController BrainPad)
{
if (light_sensor_value <= 85)
{
for (int i = 0; i < 4; i++)
{
BrainPad.Neo.SetColor(i, 0xFFC800);
}
}
}
// Function for soil moisture sensor action
static void Soil(double soilMoisture_sensor_value, DUELinkController BrainPad)
{
if (soilMoisture_sensor_value < 10)
{
for (int n = 100; n <= 150; n += 50)
{
BrainPad.System.Beep(Globals.horn_pin,(uint)(int)n, 20);
BrainPad.Neo.SetColor(0, 0xFF00FF);
BrainPad.Neo.SetColor(1, 0x00FF00);
BrainPad.Neo.SetColor(2, 0xFF00FF);
BrainPad.Neo.SetColor(3, 0x00FF00);
BrainPad.Neo.Show(Globals.led_pin, 4);
BrainPad.System.Wait(20);
BrainPad.Neo.Clear();
BrainPad.Neo.Show(Globals.led_pin, 4);
}
}
}
// Function to update LCD display - rave_lcd
static void RaveLCD(double steam_sensor_value, double light_sensor_value, double soilMoisture_sensor_value, double temperature_sensor_value, double humidity_sensor_value, DUELinkController BrainPad)
{
BrainPad.Display.DrawTextScale("BrainSense", 0xf08000, 20, 10, 2, 2);
int y = 35;
int x = 5;
BrainPad.Display.DrawTextScale("STEAM= ", 0x00ff00, x, y, 1, 2);
BrainPad.Display.DrawTextScale("LIGHT= ", 0x00ff00, x, y + 20, 1, 2);
BrainPad.Display.DrawTextScale("SOIL= ", 0x00ff00, x, y + 40, 1, 2);
BrainPad.Display.DrawText("Celsius= ", 0xf0ff00, x + 40, y + 60);
BrainPad.Display.DrawText(temperature_sensor_value.ToString(), 0xf0ff00, x + 100, y + 60);
BrainPad.Display.DrawText("Humidity= ", 0x00fff0, x + 40, y + 70);
BrainPad.Display.DrawText(humidity_sensor_value.ToString(), 0x00fff0, x + 100, y + 70);
int width = 103;
int height = 12;
y = 36;
x = 42;
// drawing the white rectangles
for (int n = 0; n < 3; n++)
{
BrainPad.Display.DrawFillRect(0xffffff, x, y, width, height);
BrainPad.Display.DrawFillRect(0x000000, x + 2, y + 2, width - 4, height - 4);
y = y + 20;
}
x = 44;
y = 38;
height = 8;
// drawing the bars based on sensors values
BrainPad.Display.DrawFillRect(0xf08000, x, y, (int)steam_sensor_value, height);
BrainPad.Display.DrawFillRect(0xf08000, x, y + 20, (int)light_sensor_value, height);
BrainPad.Display.DrawFillRect(0xf08000, x, y + 40, (int)soilMoisture_sensor_value, height);
}
// Function to update LCD display - pulse_lcd
static void PulseLCD(double steam_sensor_value, double light_sensor_value, double soilMoisture_sensor_value, double temperature_sensor_value, double humidity_sensor_value, DUELinkController BrainPad)
{
BrainPad.Display.DrawTextScale("BrainSense", 1, 3, 0, 2, 1);
int y = 15;
int x = 5;
BrainPad.Display.DrawText("STEAM= ", 1, x, y);
BrainPad.Display.DrawText(steam_sensor_value.ToString(), 1, x + 60, y);
BrainPad.Display.DrawText("LIGHT= ", 1, x, y + 10);
BrainPad.Display.DrawText(light_sensor_value.ToString(), 1, x + 60, y + 10);
BrainPad.Display.DrawText("SOIL= ", 1, x, y + 20);
BrainPad.Display.DrawText(soilMoisture_sensor_value.ToString(), 1, x + 60, y + 20);
BrainPad.Display.DrawText("Celsius= ", 1, x, y + 30);
BrainPad.Display.DrawText(temperature_sensor_value.ToString(), 1, x + 60, y + 30);
BrainPad.Display.DrawText("Humidity= ", 1, x, y + 40);
BrainPad.Display.DrawText(humidity_sensor_value.ToString(), 1, x + 60, y + 40);
}
}
}
JS
import { SerialUSB } from './serialusb.js';
import * as due from './duelink.js';
let BrainPad = new due.DUELinkController(new SerialUSB());
await BrainPad.Connect();
// Initialize sensor pins
const pir_pin = 3;
const flame_pin = 4;
const steam_pin = 5;
const temp_humid_pin = 6;
const photo_pin = 0;
const soil_pin = 1;
// Initialize actuator pins
const servo_pin = 10;
const fan_pin = 11;
const led_pin = 12;
const horn_pin = 13;
// Function for movement based on PIR sensor
async function move(motion_sensor_value) {
if (!motion_sensor_value)
await BrainPad.Servo.Set(servo_pin, 0);
else
await BrainPad.Servo.Set(servo_pin, 90);
}
// Function for steam sensor action
async function steam(steam_sensor_value) {
if (steam_sensor_value >= 70) {
BrainPad.Analog.Write(fan_pin, 50);
for (let i = 0; i < 4; i++) {
await BrainPad.Neo.SetColor(i, 0x0000FF);
}
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Function for flame sensor action
async function flame(flame_sensor_value) {
if (!flame_sensor_value) {
await BrainPad.Servo.Set(servo_pin, 90);
for (let n = 400; n <= 500; n += 5) {
await BrainPad.System.Beep(horn_pin, n, 20);
await BrainPad.Neo.SetColor(0, 0xFF0000)
await BrainPad.Neo.SetColor(1, 0x0000FF)
await BrainPad.Neo.SetColor(2, 0xFF0000)
await BrainPad.Neo.SetColor(3, 0x0000FF)
await BrainPad.Neo.Show(led_pin, 4);
await BrainPad.System.Wait(20);
await BrainPad.Neo.Clear();
await BrainPad.Neo.Show(led_pin, 4);
}
}
}
// Function for light sensor action
async function light(light_sensor_value) {
if (light_sensor_value <= 85) {
for (let i = 0; i < 4; i++) {
await BrainPad.Neo.SetColor(i, 0xFFC800);
}
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Function for soil moisture sensor action
async function soil(soilMoisture_sensor_value) {
if (soilMoisture_sensor_value < 10) {
for (let n = 100; n <= 150; n += 50) {
await BrainPad.System.Beep(horn_pin, n, 20);
await BrainPad.Neo.SetColor(0, 0xFF00FF)
await BrainPad.Neo.SetColor(1, 0x00FF00)
await BrainPad.Neo.SetColor(2, 0xFF00FF)
await BrainPad.Neo.SetColor(3, 0x00FF00)
await BrainPad.Neo.Show(led_pin, 4);
await BrainPad.System.Wait(20);
await BrainPad.Neo.Clear();
await BrainPad.Neo.Show(led_pin, 4);
}
}
}
// Function to update LCD display - rave_lcd
async function rave_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value) {
await BrainPad.Display.DrawTextScale("BrainSense", 0xf08000, 20, 10, 2, 2);
let y = 35;
let x = 5;
await BrainPad.Display.DrawTextScale("STEAM= ", 0x00ff00, x, y, 1, 2);
await BrainPad.Display.DrawTextScale("LIGHT= ", 0x00ff00, x, y + 20, 1, 2);
await BrainPad.Display.DrawTextScale("SOIL= ", 0x00ff00, x, y + 40, 1, 2);
await BrainPad.Display.DrawText("Celsius= ", 0xf0ff00, x + 40, y + 60);
await BrainPad.Display.DrawText(temperature_sensor_value.toString(), 0xf0ff00, x + 100, y + 60);
await BrainPad.Display.DrawText("Humidity= ", 0x00fff0, x + 40, y + 70);
await BrainPad.Display.DrawText(humidity_sensor_value.toString(), 0x00fff0, x + 100, y + 70);
let width = 103;
let height = 12;
y = 36;
x = 42;
// Drawing the white rectangles
for (let n = 0; n < 3; n++) {
await BrainPad.Display.DrawFillRect(0xffffff, x, y, width, height);
await BrainPad.Display.DrawFillRect(0x000000, x + 2, y + 2, width - 4, height - 4);
y += 20;
}
x = 44;
y = 38;
height = 8;
// Drawing the bars based on sensor values
await BrainPad.Display.DrawFillRect(0xf08000, x, y, steam_sensor_value, height);
await BrainPad.Display.DrawFillRect(0xf08000, x, y + 20, light_sensor_value, height);
await BrainPad.Display.DrawFillRect(0xf08000, x, y + 40, soilMoisture_sensor_value, height);
}
// Function to update LCD display - pulse_lcd
async function pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value) {
await BrainPad.Display.DrawTextScale("BrainSense", 1, 3, 0, 2, 1)
let y = 15
let x = 5
await BrainPad.Display.DrawText("STEAM= ", 1, x, y)
await BrainPad.Display.DrawText(steam_sensor_value.toString(), 1, x + 60, y)
await BrainPad.Display.DrawText("LIGHT= ", 1, x, y + 10)
await BrainPad.Display.DrawText(light_sensor_value.toString(), 1, x + 60, y + 10)
await BrainPad.Display.DrawText("SOIL= ", 1, x, y + 20)
await BrainPad.Display.DrawText(soilMoisture_sensor_value.toString(), 1, x + 60, y + 20)
await BrainPad.Display.DrawText("Celsius= ", 1, x, y + 30)
await BrainPad.Display.DrawText(temperature_sensor_value.toString(), 1, x + 60, y + 30)
await BrainPad.Display.DrawText("Humidity= ", 1, x, y + 40)
await BrainPad.Display.DrawText(humidity_sensor_value.toString(), 1, x + 60, y + 40)
}
// Main loop
async function mainLoop() {
while (true) {
await BrainPad.Display.Clear(0);
await BrainPad.Neo.Clear();
let motion_sensor_value = await BrainPad.Digital.Read(pir_pin, 1);
let steam_sensor_value = await BrainPad.Analog.Read(steam_pin);
let flame_sensor_value = await BrainPad.Digital.Read(flame_pin, 1);
let light_sensor_value = await BrainPad.Analog.Read(photo_pin);
let soilMoisture_sensor_value = await BrainPad.Analog.Read(soil_pin);
let temperature_sensor_value = await BrainPad.Temperature.Read(temp_humid_pin, 11);
let humidity_sensor_value = await BrainPad.Humidity.Read(temp_humid_pin, 11);
await BrainPad.Analog.Write(fan_pin, 0);
await pulse_lcd(steam_sensor_value, light_sensor_value, soilMoisture_sensor_value, temperature_sensor_value, humidity_sensor_value);
await move(motion_sensor_value);
await steam(steam_sensor_value);
await flame(flame_sensor_value);
await light(light_sensor_value);
await soil(soilMoisture_sensor_value);
await BrainPad.Display.Show();
await BrainPad.Neo.Show(led_pin, 4);
}
}
// Call the main loop function
mainLoop();What’s Next?
Can you make with a colorful BrainPad Rave LCD a better dashboard that shows the values of sensors in the shape of dynamics bars instead of using the numbers and making each sensor value with a suitable color?
BrainStorm
Explore innovative ways to amplify the impact of our sensors and seamlessly integrate them with modules like motors, sounds, and lights. Consider dynamic automation scenarios to create responsive and immersive experiences, ensuring the maximum and effective utilization of our smart home technology.